A lição começa com duas descrições matemáticas equivalentes de medições:
Medições gerais podem ser descritas por coleções de matrizes, uma para cada resultado de medição, de forma que generaliza a descrição de medições projetivas.
Medições gerais podem ser descritas como canais cujas saídas são sempre estados clássicos (representados por matrizes de densidade diagonais).
Vamos restringir nossa atenção a medições com finitos resultados possíveis.
Embora seja possível definir medições com infinitos resultados possíveis, elas são muito menos comuns no contexto de computação e processamento de informação, e também exigem matemática adicional (a saber, teoria da medida) para serem formalizadas adequadamente.
Nosso foco inicial será nas chamadas medições destrutivas, em que a saída da medição é apenas um resultado clássico — sem nenhuma especificação do estado quântico pós-medição do sistema que foi medido.
Intuitivamente, podemos imaginar que tal medição destrói o próprio sistema quântico, ou que o sistema é descartado imediatamente após a medição ser realizada.
Mais adiante na lição vamos ampliar nossa visão e considerar medições não destrutivas, em que há tanto um resultado clássico quanto um estado quântico pós-medição do sistema medido.
Suponha que X é um sistema a ser medido, e assuma por simplicidade que o conjunto de estados clássicos de X é {0,…,n−1} para algum inteiro positivo n, de modo que as matrizes de densidade que representam estados quânticos de X são matrizes n×n.
Na verdade, não precisaremos muito nos referir aos estados clássicos de X, mas será conveniente nos referir a n, o número de estados clássicos de X.
Também vamos assumir que os resultados possíveis da medição são os inteiros 0,…,m−1 para algum inteiro positivo m.
Note que estamos apenas usando esses nomes para manter as coisas simples;
é direto generalizar tudo que se segue para outros conjuntos finitos de estados clássicos e resultados de medição, renomeando-os conforme desejado.
Lembre-se de que uma medição projetiva é descrita por uma coleção de matrizes de projeção que somam à matriz identidade.
Em símbolos,
{Π0,…,Πm−1}
descreve uma medição projetiva de X se cada Πa é uma matriz de projeção n×n e a seguinte condição é satisfeita.
Π0+⋯+Πm−1=IX
Quando tal medição é realizada em um sistema X enquanto ele está em um estado descrito por algum vetor de estado quântico ∣ψ⟩, cada resultado a é obtido com probabilidade igual a ∥Πa∣ψ⟩∥2.
Também temos que o estado pós-medição de X é obtido normalizando o vetor Πa∣ψ⟩, mas estamos ignorando o estado pós-medição por enquanto.
Se o estado de X é descrito por uma matriz de densidade ρ em vez de um vetor de estado quântico ∣ψ⟩, então podemos expressar alternativamente a probabilidade de obter o resultado a como Tr(Πaρ).
Se ρ=∣ψ⟩⟨ψ∣ é um estado puro, então as duas expressões são iguais:
Aqui estamos usando a propriedade cíclica do traço para a segunda igualdade, e para a terceira igualdade estamos usando o fato de que cada Πa é uma matriz de projeção e, portanto, satisfaz Πa2=Πa.
Em geral, se ρ é uma combinação convexa
ρ=k=0∑N−1pk∣ψk⟩⟨ψk∣
de estados puros, então a expressão Tr(Πaρ) coincide com a probabilidade média do resultado a, graças ao fato de que essa expressão é linear em ρ.
Uma descrição matemática para medições gerais é obtida relaxando a definição de medições projetivas.
Especificamente, permitimos que as matrizes da coleção que descreve a medição sejam matrizes semidefinidas positivas arbitrárias em vez de projeções.
(Projeções são sempre semidefinidas positivas; elas podem ser alternativamente definidas como matrizes semidefinidas positivas cujos autovalores são todos 0 ou 1.)
Em particular, uma medição geral de um sistema X com resultados 0,…,m−1 é especificada por uma coleção de matrizes semidefinidas positivas {P0,…,Pm−1} cujas linhas e colunas correspondem aos estados clássicos de X e que satisfazem a condição
P0+⋯+Pm−1=IX.
Se o sistema X é medido enquanto está em um estado descrito pela matriz de densidade ρ, então cada resultado
a∈{0,…,m−1} aparece com probabilidade Tr(Paρ).
Como naturalmente devemos exigir, o vetor de probabilidades dos resultados
(Tr(P0ρ),…,Tr(Pm−1ρ))
de uma medição geral sempre forma um vetor de probabilidades, para qualquer escolha de matriz de densidade ρ.
As duas observações a seguir estabelecem que esse é o caso.
Cada valor Tr(Paρ) deve ser não negativo, em razão do fato de que o traço do produto de quaisquer duas matrizes semidefinidas positivas é sempre não negativo:
Q,R≥0⇒Tr(QR)≥0.
Uma maneira de argumentar esse fato é usar decomposições espectrais de Q e R juntamente com a propriedade cíclica do traço para expressar o traço do produto QR como uma soma de números reais não negativos, que portanto deve ser não negativa.
A condição P0+⋯+Pm−1=IX junto com a linearidade do traço garante que as probabilidades somam 1.
Suponha que X é um qubit, e defina duas matrizes como segue.
P0=(32313131)P1=(31−31−3132)
Ambas são matrizes semidefinidas positivas: são Hermitianas, e em ambos os casos os autovalores são 1/2±5/6, que são ambos positivos.
Também temos que P0+P1=I, e portanto {P0,P1} descreve uma medição.
Se o estado de X é descrito por uma matriz de densidade ρ e realizamos essa medição, então a probabilidade de obter o resultado 0 é Tr(P0ρ) e a probabilidade de obter o resultado 1 é
Tr(P1ρ).
Por exemplo, se ρ=∣+⟩⟨+∣ então as probabilidades para os dois resultados 0 e 1 são as seguintes.
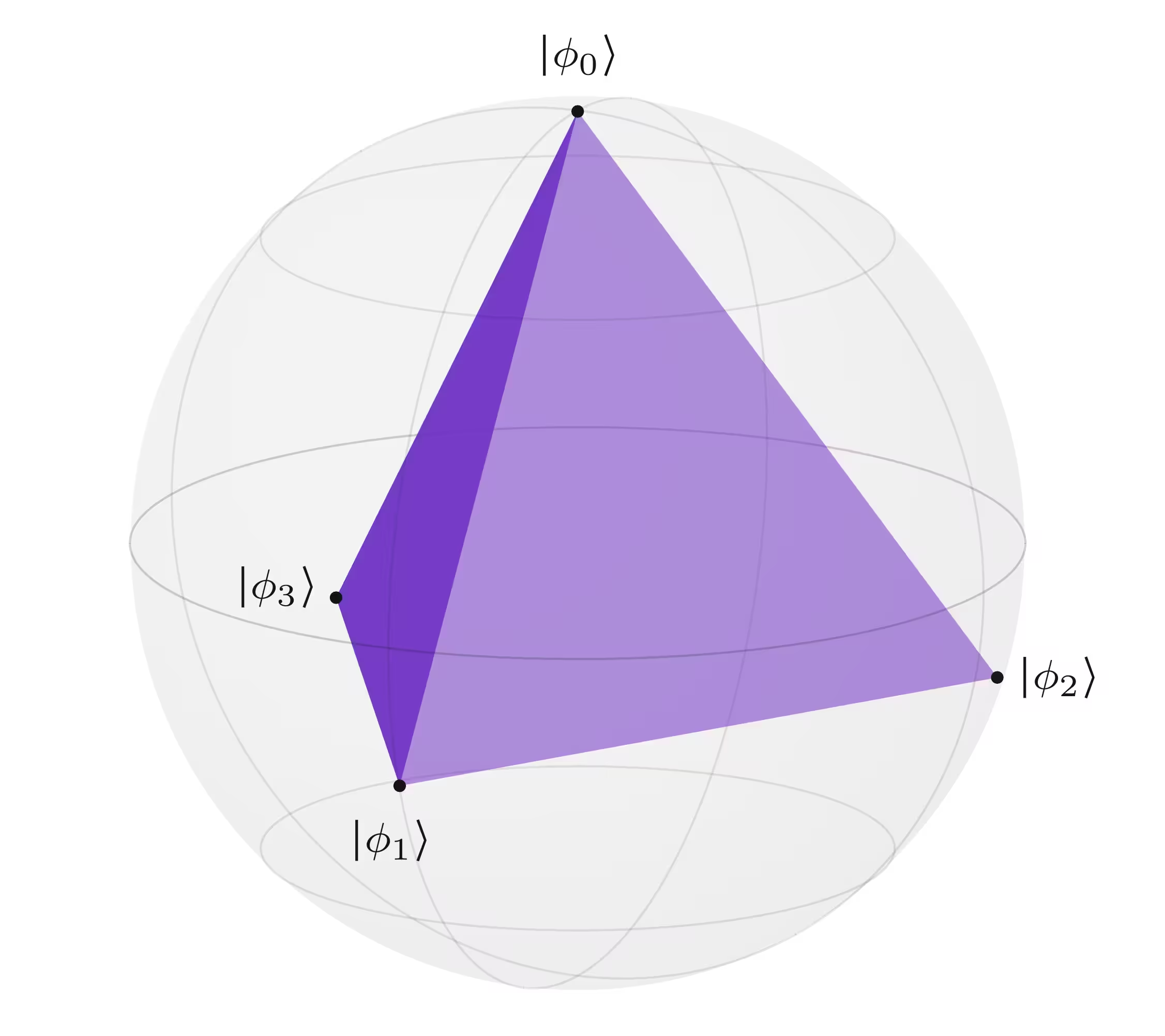
Esses quatro estados estão perfeitamente distribuídos na esfera de Bloch, cada um equidistante dos outros três e com os ângulos entre quaisquer dois deles sendo sempre os mesmos.
Agora vamos definir uma medição {P0,P1,P2,P3} de um qubit estabelecendo Pa como segue para cada a=0,…,3.
Pa=2∣ϕa⟩⟨ϕa∣
Podemos verificar que essa é uma medição válida da seguinte forma.
Cada Pa é evidentemente semidefinida positiva, sendo um estado puro dividido por um meio.
Ou seja, cada uma é uma matriz Hermitiana e possui um autovalor igual a 1/2 e todos os outros autovalores iguais a zero.
A soma dessas matrizes é a matriz identidade: P0+P1+P2+P3=I.
As expressões dessas matrizes como combinações lineares de matrizes de Pauli tornam isso direto de verificar.
Uma segunda forma de descrever medições em termos matemáticos é como canais.
A informação clássica pode ser vista como um caso especial de informação quântica, na medida em que podemos identificar estados probabilísticos com matrizes densidade diagonais.
Assim, em termos operacionais, podemos pensar nas medições como canais cujas entradas são matrizes que descrevem estados de qualquer sistema sendo medido e cujas saídas são matrizes densidade diagonais que descrevem a distribuição resultante dos resultados de medição.
Veremos em breve que qualquer canal com essa propriedade pode sempre ser escrito em uma forma simples e canônica que se conecta diretamente à descrição de medições como coleções de matrizes semidefinidas positivas.
Por outro lado, dada uma medição arbitrária como uma coleção de matrizes, há sempre um canal válido com a propriedade de saída diagonal que descreve a medição em questão, conforme sugerido no parágrafo anterior.
Juntando essas observações, concluímos que as duas descrições de medições gerais são equivalentes.
Antes de prosseguir, vamos ser mais precisos sobre a medição, como a estamos encarando como um canal e quais suposições estamos fazendo sobre ela.
Como antes, vamos supor que X é o sistema a ser medido e que os possíveis resultados da medição são os inteiros 0,…,m−1 para algum inteiro positivo m.
Seja Y o sistema que armazena os resultados da medição, de modo que seu conjunto de estados clássicos é {0,…,m−1}, e representamos a medição como um canal chamado Φ de X para Y.
Nossa suposição é que Y é clássico — ou seja, independentemente do estado com que começamos para X, o estado de Y que obtemos é representado por uma matriz densidade diagonal.
Podemos expressar matematicamente que a saída de Φ é sempre diagonal da seguinte forma.
Primeiro, definimos o canal completamente defasante Δm em Y.
Δm(σ)=a=0∑m−1⟨a∣σ∣a⟩∣a⟩⟨a∣
Esse canal é análogo ao canal qubit completamente defasante Δ da lição anterior.
Como mapeamento linear, ele zera todas as entradas fora da diagonal de uma matriz de entrada e mantém a diagonal inalterada.
E agora, uma forma simples de expressar que uma dada matriz densidade σ é diagonal é pela equação
σ=Δm(σ).
Em palavras, zerar todas as entradas fora da diagonal de uma matriz densidade não tem efeito se e somente se as entradas fora da diagonal já eram todas zero.
O canal Φ satisfaz portanto nossa suposição — de que Y é clássico — se e somente se
Φ(ρ)=Δm(Φ(ρ))
para toda matriz densidade ρ representando um estado de X.
Assim, para essas mesmas matrizes P0,…,Pm−1, podemos expressar o canal Φ da seguinte forma.
Φ(ρ)=a=0∑m−1Tr(Paρ)∣a⟩⟨a∣
Essa expressão é consistente com nossa descrição de medições gerais em termos de matrizes, pois vemos cada resultado de medição aparecendo com probabilidade Tr(Paρ).
Agora vamos observar que as duas propriedades exigidas da coleção de matrizes {P0,…,Pm−1} para descrever uma medição geral são de fato satisfeitas.
A primeira propriedade é que todas são matrizes semidefinidas positivas.
Uma forma de ver isso é observar que, para todo vetor ∣ψ⟩ com entradas em correspondência com o estado clássico de X, temos
Agora vamos verificar que, para qualquer coleção {P0,…,Pm−1} de matrizes semidefinidas positivas satisfazendo P0+⋯+Pm−1=IX, o mapeamento definido por
Φ(ρ)=a=0∑m−1Tr(Paρ)∣a⟩⟨a∣
é de fato um canal válido de X para Y.
Uma forma de fazer isso é calcular a representação de Choi desse mapeamento.
A transposta de cada Pa é introduzida na terceira igualdade porque
⟨c∣Pa∣b⟩=⟨b∣PaT∣c⟩.
Isso permite que as expressões ∣b⟩⟨b∣ e ∣c⟩⟨c∣ apareçam, as quais se simplificam para a matriz identidade ao somar sobre b e c, respectivamente.
Pela suposição de que P0,…,Pm−1 são semidefinidas positivas, o mesmo vale para P0T,…,Pm−1T.
Em particular, transpor uma matriz Hermitiana resulta em outra matriz Hermitiana, e os autovalores de qualquer matriz quadrada e de sua transposta sempre coincidem.
Segue-se que J(Φ) é semidefinida positiva.
Traçando o sistema de saída Y (que é o sistema à direita), obtemos
Suponha que temos múltiplos sistemas que estão coletivamente em um estado quântico, e uma medição geral é realizada em um dos sistemas.
Isso resulta em um dos resultados de medição, selecionado aleatoriamente de acordo com probabilidades determinadas pela medição e pelo estado do sistema antes da medição.
O estado resultante dos sistemas restantes dependerá então, em geral, de qual resultado de medição foi obtido.
Vamos examinar como isso funciona para um par de sistemas (X,Z) quando o sistema X é medido.
(Estamos nomeando o sistema à direita de Z porque usaremos Y para representar o sistema que armazena a saída clássica da medição quando a encaramos como um canal.)
Podemos então generalizar facilmente para a situação em que os sistemas têm a ordem invertida, bem como para três ou mais sistemas.
Suponha que o estado de (X,Z) antes da medição é descrito por uma matriz densidade ρ, que podemos escrever da seguinte forma.
ρ=b,c=0∑n−1∣b⟩⟨c∣⊗ρb,c
Nessa expressão estamos assumindo que os estados clássicos de X são 0,…,n−1.
Vamos supor que a medição em si é descrita pela coleção de matrizes
{P0,…,Pm−1}.
Essa medição pode ser descrita alternativamente como um canal Φ de X para Y, onde Y é um novo sistema com conjunto de estados clássicos {0,…,m−1}.
Especificamente, a ação desse canal pode ser expressa da seguinte forma.
Estamos considerando uma medição do sistema X, então as probabilidades com que os diferentes resultados de medição são obtidos podem depender apenas de ρX, o estado reduzido de X.
Em particular, a probabilidade para cada resultado a∈{0,…,m−1} aparecer pode ser expressa de três formas equivalentes.
Tr(PaρX)=Tr(PaTrZ(ρ))=Tr((Pa⊗IZ)ρ)
A primeira expressão representa naturalmente a probabilidade de se obter o resultado a com base no que já sabemos sobre medições de um único sistema.
Para obter a segunda expressão, estamos simplesmente usando a definição ρX=TrZ(ρ).
Para obter a terceira expressão é necessário pensar um pouco mais — e encorajamos você a se convencer de que ela é verdadeira.
Uma dica: a equivalência entre a segunda e a terceira expressões na equação anterior não depende de ρ ser uma matriz densidade nem de cada Pa ser semidefinida positiva. Tente mostrar isso primeiro para produtos tensoriais da forma ρ=M⊗N e depois conclua que deve ser verdadeiro em geral pela linearidade.
Embora a equivalência entre a primeira e a terceira expressões na equação anterior possa não ser imediata, ela faz sentido.
A partir de uma medição em X, estamos efetivamente definindo uma medição de (X,Z), na qual simplesmente descartamos Z e medimos X.
Como toda medição, essa nova medição pode ser descrita por uma coleção de matrizes, e não é surpreendente que essa medição seja descrita pela coleção
Se quisermos determinar não apenas as probabilidades dos diferentes resultados, mas também o estado resultante de Z condicionado a cada resultado de medição, podemos recorrer à descrição do canal de medição.
Em particular, vamos examinar o estado que obtemos quando aplicamos Φ a X e não fazemos nada com Z.
Note que isso é uma matriz densidade em virtude do fato de que Φ é um canal, de modo que cada matriz
TrX((Pa⊗IZ)ρ) é necessariamente semidefinida positiva.
Um passo final transforma essa expressão em uma que revela o que estamos procurando.
como vimos na lição de Matrizes densidade.
Para cada resultado de medição a∈{0,…,m−1}, temos com probabilidade
p(a)=Tr((Pa⊗IZ)ρ)
que Y está no estado clássico ∣a⟩⟨a∣ e Z está no estado
σa=Tr((Pa⊗IZ)ρ)TrX((Pa⊗IZ)ρ).(2)
Ou seja, essa é a matriz densidade que obtemos normalizando
TrX((Pa⊗IZ)ρ)
dividindo-a pelo seu traço.
(Formalmente, o estado σa só é definido quando a probabilidade p(a) é não nula;
quando p(a)=0, esse estado é irrelevante, pois se refere a um evento discreto que ocorre com probabilidade zero.)
Naturalmente, as probabilidades dos resultados são consistentes com nossas observações anteriores.
Em resumo, isso é o que acontece quando a medição {P0,…,Pm−1} é realizada em X quando (X,Z) está no estado ρ.
Cada resultado a aparece com probabilidade p(a)=Tr((Pa⊗IZ)ρ).
Condicionado ao resultado a, o estado de Z é então representado pela matriz densidade σa mostrada na equação (2), que é obtida normalizando TrX((Pa⊗IZ)ρ).
Podemos adaptar essa descrição a outras situações, como quando a ordem dos sistemas é invertida ou quando há três ou mais sistemas.
Conceitualmente é simples, embora possa ser trabalhoso escrever as fórmulas.
Em geral, se temos r sistemas X1,…,Xr, o estado do sistema composto (X1,…,Xr) é ρ, e a medição {P0,…,Pm−1} é realizada em Xk, ocorre o seguinte.
Cada resultado a aparece com probabilidade
p(a)=Tr((IX1⊗⋯⊗IXk−1⊗Pa⊗IXk+1⊗⋯⊗IXr)ρ).
Condicionado ao resultado a, o estado de (X1,…,Xk−1,Xk+1,…,Xr) é então representado pela seguinte matriz densidade.